Unity6.1以降でプロジェクトを作成した際に、
実行すると次のようなエラーが表示されることがあります。
InvalidOperationException: You are trying to read Input using the UnityEngine.Input class, but you have switched active Input handling to Input System package in Player Settings.
Unity6.1以降ではデフォルトで新InputSystemを使う設定になっているため、
Input.GetMouseButtonDown()やInput.GetKeyDown()のような、
古いInputSystemが使えなくなっていることが原因です。
対処法
新旧のInputSystemを使える設定に変更します。
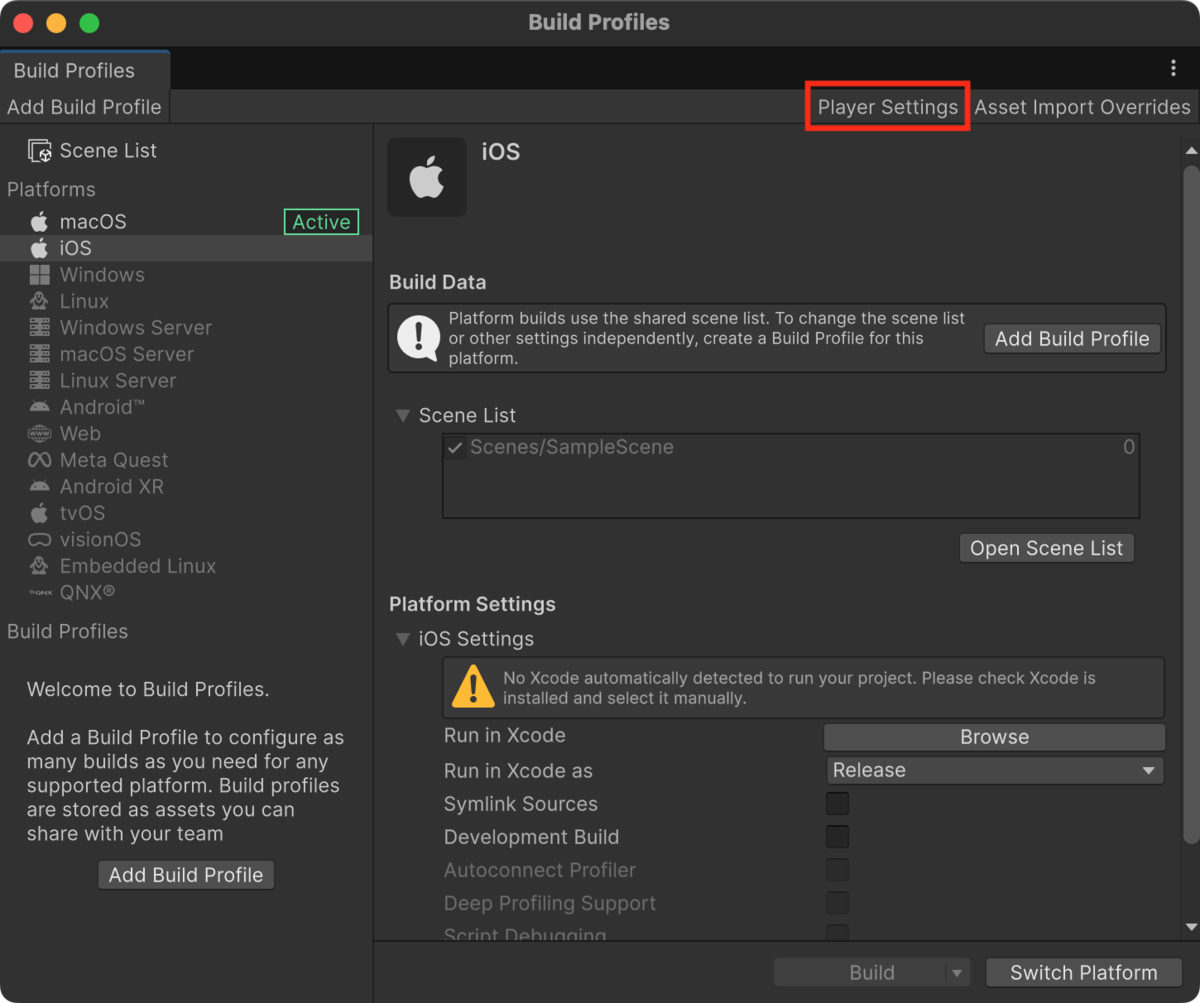
メニューバーからFile→Build ProfilesをクリックしてBuild Profilesウインドウを開き、
Build Profilesウインドウの右上のPlayer Settingsをクリックしてください。
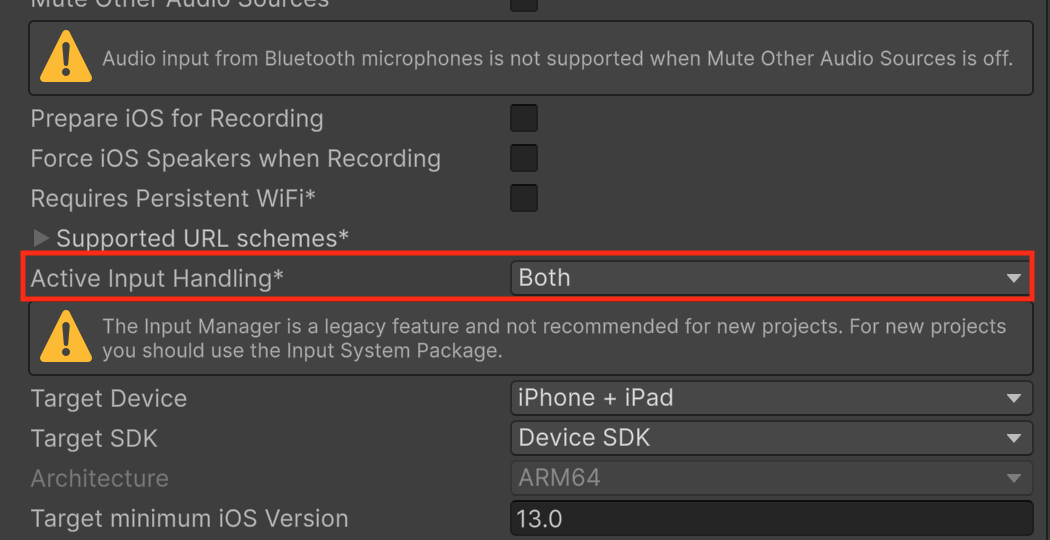
Other SettingsのActive Input Handlingを「Both」に変更してください。
Unity editor restart requiredのウインドウが表示されるのでApplyをクリックしてUnityを再起動してください。

Unityが再起動するので、もう一度プロジェクトが起動したら実行しみてください。