IKって便利そうだけど、設定がなんかヤヤコシイ・・・と感じている方が多いように思います。ボーンにIKの設定をするだけなんですが、ボーンの構造の複雑度に応じてIKの設定も大変になります。

最初はメッシュとの関連付けなどはせずに、素のボーンだけを使ってIKの設定と動きを理解しましょう!
単純なIKを設定する
まずは簡単なボーンの構造を使ってIKの理解を深めていきましょう。
オブジェクトモードでShift+Aを押してメニューを表示し、アーマチュア→単一のボーンを選択してください。ボーンが1つ追加されます。

オブジェクトモードから編集モードに変更し、gキーでの移動とeキーでの押し出しを使って次のようなボーンを作ってください。
上2つのボーンがそれぞれ太ももボーンとすねボーン、最後の一本がコントロール用のボーンという想定です。想像力大切(笑)

さて、それではIKを設定していきましょう。流れは次のとおりです。
- コントロール用ボーンを切り離す
- すねボーンにIKを設定する
- IKコンストレイントにコントロールボーンを指定する
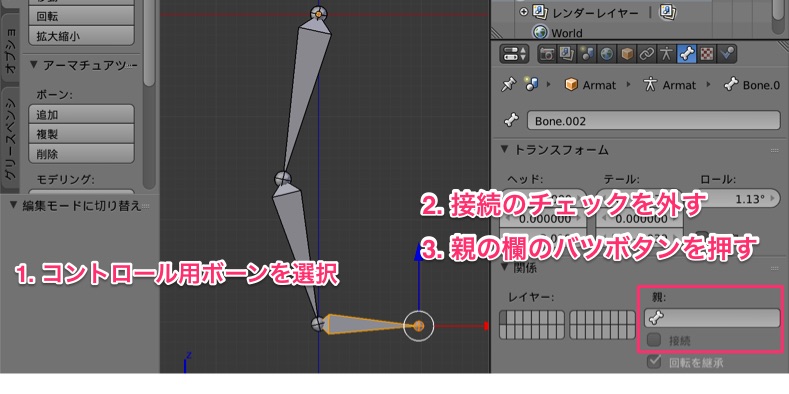
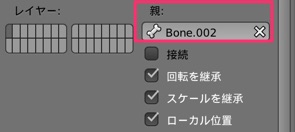
まずはコントロール用のボーンをすねボーンから切り離しましょう。編集モードでコントロール用のボーンを選択し、ボーンのパネルから「接続」のチェックを外して、次に親の欄のバツボタンを押してください。「接続」→「親」という順番が大切です。
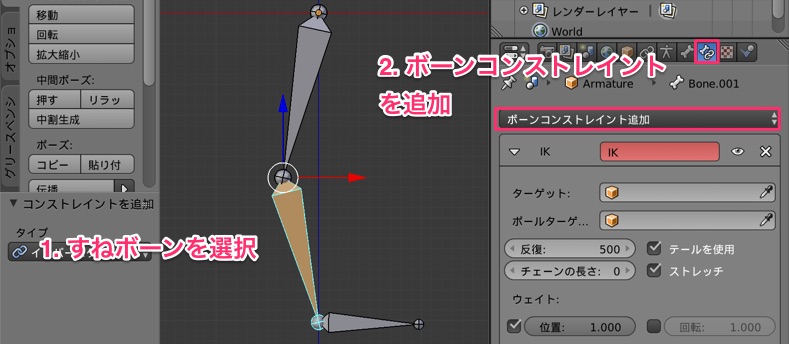
次にすねボーンにIKを設定します。「ポーズモード」ですねボーンを選択し、ボーンコンストレイントのパネルからトラッキング→インバースキネマティクス(IK)を選択してください。
最後にボーンコンストレイントの設定をします。ターゲットにArmature、ボーンにコントロール用ボーン(ここではBone.002)を指定し、チェーンの長さを「2」に設定します。
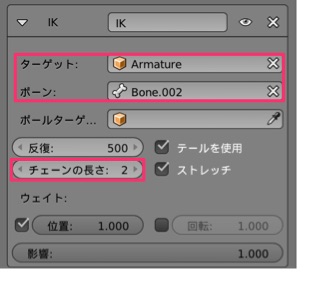
チェーンの長さを設定することで、コントロール用のボーンから何個さかのぼってIKの計算をするかを指定することが出来ます。ここではすねボーン(IKボーン)→太ももボーンと2つさかのぼってIKの挙動を計算するのでチェーンの長さを「2」にしています。
動作させると次のような感じになります。
簡単なIKの設定方法がわかったところで、もう少し複雑なボーンのIKにも挑戦してみましょう。
足先まで含めたIKを考える
上では太ももとすねの2つだけのボーンでIKを設定しました。動物の場合はこれでも良いのですが、人間の場合は足先のボーンまで作らないと不自然な動きになってしまいます。
先程のボーンにつなげる感じで、足先ボーンも作りましょう。すねボーンの先端(コントロールボーンとの接続部分)を選択して、eキーで押し出し、足先ボーンを作ります。
この状態でコントロールボーンを動かしてみましょう。足を持ち上げると同時に足先が回転してしまっているため、このままでは、非常に使いにくいですね。
これは足先のボーンがIKを設定したすねのボーンの影響を受けていることが原因です。そこで一旦すねボーンと足先ボーンの接続を切ります。
編集モードで足先ボーンを選択し、ボーンパネルから「接続のチェックを外す」→「親をバツボタンで削除」の順番ですねボーンと切り離してください。ここでも順番が大切です。

足先ボーンがIKボーンと切り離せたところで、この足先ボーンはコントロール用のボーンの子要素にしましょう。これによりコントロールボーンの動きと同調して動くようになります。今削除した親の欄からコントロールボーン(Bone.002)を選択してください。
設定できたらポーズモードでコントロールボーンを動かしてみてください。
足首ボーンが足の上下とは関係なく地面と平行に保たれていますね!また、コントロールボーンを回転することで足首ボーンが回転することも確認しておきましょう。